
Mapeo y optimización de datos de rutas y paradas del transporte municipal PumaKatari, rutas peatonales y ciclistas cercanas, de la ciudad de La Paz, Bolivia
- Cristhian Danny Mayta Quispe, Silvana Esther Cachi Zambrana, Soledad Bautista Yujra, Silvio Enrique Flores Calle
- Jan 8
- 16 min read
RUTA IRPAVI 2 SUR
(Capitulo YouthMappers UMSA Bolivia) MicroGrants Latam
Aviso: La publicación de este artículo se ha retrasado y es posible que contenga información desactualizada. Agradecemos su comprensión.
English translation below.
La ciudad de La Paz, Bolivia, cuenta con el servicio de transporte público PumaKatari, que abarca los 9 macrodistritos y se despliega actualmente a través de 10 rutas. Desde su lanzamiento, este servicio ha sido una gran promesa, ofreciendo beneficios como trato preferencial para personas con discapacidad, niños y ancianos, además de permitir el transporte de bicicletas en los compartimentos delanteros de los buses, fomentando así el uso de este medio de transporte ecológico.
A menudo nos transportamos a diferentes lugares de la ciudad para realizar nuestros trabajos de campo. Sabemos que algunos visitantes, o incluso personas que conocen este servicio de transporte, enfrentan dificultades porque no saben qué ruta tomar o dónde están las paradas, especialmente cuando intentan llegar a zonas periféricas.
Hemos tenido la experiencia de buscar una parada del PumaKatari y, al intentar encontrarla, el navegador nos indicó una ubicación que, al llegar, descubrimos que ya no estaba en uso. Esto nos hizo preguntarnos: ¿qué tan confiable es la información que estamos utilizando?. Como conocedores de OpenStreetMap (OSM), decidimos investigar si la información del PumaKatari estaba actualizada en esta plataforma.
Al indagar más a fondo, encontramos que la información disponible en OSM de esta área presenta imprecisiones en algunos datos y falta de datos actualizados sobre rutas y paradas vehiculares del transporte municipal PumaKatari.
Al mes de noviembre de 2023, se podía evidenciar que en la plataforma OpenStreetMap, de las 10 rutas del PumaKatari, solo 5 están mapeadas en OSM, es decir, apenas el 50%. Y de las 603 paradas que existen, solo 288 están registradas (el 48%), y muchas de estas de manera incompleta o imprecisa.
Se pudo notar también que las rutas peatonales (aceras) y las rutas ciclistas están mapeadas en muy pocos tramos, y en algunos de manera desconectada. Parece que los mapeos se han hecho de manera aislada, sin una coordinación clara, por lo que es un proyecto que vale la pena emprender para facilitar la vida de todos los que nos movemos por La Paz.
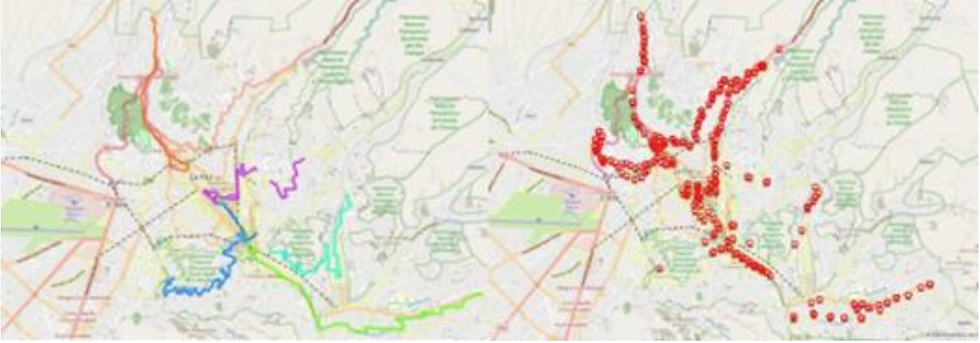
Rutas y paradas descargadas de OSM, solo 5 de las 10 rutas existentes y 288 de 603 paradas / Routes and stops downloaded from OSM, only 5 of the 10 existing routes and 288 of 603 stops.

Mapa Base del Área de estudio, con las 10 rutas y 603 paradas descargadas la página de La paz Bus (información disponible de la unidad de planificación de movilidad) / Base Map of the Study Area, with the 10 routes and 603 stops downloaded from the La Paz Bus website (information available in the mobility planning unit)

Rutas y Paradas mapeadas con Imprecisión / Routes and Stops mapped with inaccuracy
Mediante una investigación en las páginas de la Alcaldía, identificamos una fuente confiable que detalla los recorridos realizados por este sistema de transporte. Descargamos la información disponible en la página de la Unidad de Planificación de Movilidad de la Alcaldía y la comparamos con la información disponible en OSM.
Área a Mapear

Para abordar esta problemática, se seleccionó la ruta de Irpavi II Sur como área piloto para el mapeo y actualización en OpenStreetMap. El mapa muestra la ruta de ida y vuelta, así como el área cubierta por el mapeo. Durante el proceso, se descargaron paradas del PumaKatari desde OSM, pero se observó que algunas no fueron reconocidas debido a la falta de uniformidad en la edición.
Los puntos negros representan estas paradas, mientras que los puntos naranjas indican las paradas descargadas desde la plataforma de la Alcaldía. Esto resalta la necesidad de actualizar OSM para reflejar con precisión todas las paradas de la ruta Irpavi II Sur, garantizando la integridad de la información sobre el transporte público.
Propósito
Este proyecto no solo busca actualizar y agregar información en OpenStreetMap, sino también corregir la falta de estandarización observada. Mapearemos rutas peatonales y ciclistas cercanas a las del PumaKatari para proporcionar infraestructura segura y fomentar el uso de bicicletas.
Además, el proyecto incentivará la participación comunitaria en el uso de transporte sostenible y capacitará a los jóvenes de YouthMappers-UMSA para el mapeo y actualización de datos.
En una reunión de presentación del proyecto a la Alcaldía, nos informaron sobre una aplicación que ya incluía las paradas y rutas, aunque algunos de nosotros no conocíamos su existencia. Vimos que, fuera de esta aplicación, la información no está actualizada ni disponible en otros navegadores.
Con el objetivo de contribuir positivamente a la ciudad que nos ha acogido, esperamos que nuestra iniciativa ayude a mejorar la distribución de la información sobre el transporte en la comunidad.
Para fortalecer nuestro proyecto, contactamos a Trufi Association, quienes tienen amplia experiencia en el desarrollo de aplicaciones móviles para el transporte urbano y en el mapeo de rutas en OpenStreetMap. Durante una visita al departamento de Cochabamba, nos recibieron y, amablemente, nos compartieron sus experiencias. También nos proporcionaron un curso con las herramientas necesarias, lo que nos ayudó a mejorar nuestra puesta en marcha de este proyecto.
Metodología

Metodología detallada y herramientas tecnológicas usadas /Detailed methodology and technological tools used
Levantamiento Fotogramétrico
La primera fase de este proyecto consistió en realizar el levantamiento fotogramétrico de la ruta de Irpavi II Sur y PumaKatari utilizando una aeronave UAV, así como en llevar a cabo el procesamiento fotogramétrico correspondiente.
Primero, usamos un dron para capturar imágenes aéreas de la ruta Irpavi II Sur del PumaKatari y procesarlas para asegurarnos de que fueran precisas. Estas imágenes se subieron a OpenAerialMap.

Imagen de aeronave UAV georreferenciada y orto rectificada subida a plataforma Open Aerial Map / Georeferenced and orthorectified UAV aircraft image uploaded to the Open Aerial Map platform
Recolección de Datos: Ruta IRPAVI II

Recopilación de datos de las rutas de autobús de Pumakatari mediante aplicaciones móviles / Collecting data from Pumakatari bus routes using mobile applications
En la segunda etapa, recolectamos datos en campo utilizando la aplicación StreetComplete para identificar el tipo de superficie de la vía, verificar si contaba con aceras e iluminación, y generar notas para el llenado de datos en cada una de las paradas. Además, también se pudo registrar la presencia o ausencia de aceras en los datos recopilados con StreetComplete.
Con la aplicación Mapillary, capturamos el recorrido de ida y vuelta, documentando tanto el lado izquierdo como el derecho de la vía.
Mapeo Remoto
Con las imágenes aéreas ya publicadas en OpenAerialMap, se crearon dos proyectos en la plataforma de TeachOSM Tasking Manager, aprovechando la ventaja de poder enlazar directamente las fotografías aéreas que subimos a OpenAerialMap en Tasking Manager.
El primer proyecto se enfocó exclusivamente en el mapeo de vías y paradas, mientras que el segundo se centró en el mapeo de casas, edificios e infraestructura, con el fin de aprovechar al máximo las imágenes capturadas por el dron.
Para comenzar con el trabajo, fue necesario realizar capacitaciones en las que se compartió el propósito del proyecto.

Capacitación a la comunidad YouthMappers-UMSA para el completo y correcto mapeo de rutas y paradas en OpenStreetMap / Training for the YouthMappers-UMSA community for the complete and correct mapping of routes and stops in OpenStreetMap
Finalmente, capacitamos a la comunidad YouthMappers-UMSA para que pudieran mapear con precisión las rutas y paradas en OpenStreetMap, incluyendo las rutas peatonales y ciclistas cercanas.

Entrenamiento y desarrollo de capacidades de mapeo de rutas y edificaciones / Training and development of capabilities in mapping routes and buildings.
Para el mapeo de rutas y paradas, añadimos información esencial como el costo del servicio, el operador, el tipo de pago y los horarios. También registramos el tipo de superficie de la ruta, que varía a lo largo del recorrido. En cuanto a las paradas, anotamos si cuentan con asientos, basureros, sombrillas y si tienen iluminación. Además, añadimos la cantidad de carriles y su dirección.
Para una descripción más detallada de las etiquetas usadas, puedes consultar el siguiente enlace:

Con el mapeo de vías peatonales y aceras, pudimos identificar varios aspectos importantes, como si tenían bordillos elevados o rebajados, si el cruce peatonal estaba marcado o no, y si había senderos peatonales. En lugares alejados en las periferias, incluso notamos la ausencia de aceras. Este mapeo es muy importante para garantizar la accesibilidad, especialmente para usuarios de sillas de ruedas, y para evaluar la accesibilidad de los establecimientos.

Añadiendo etiquetas necesarias para el mapeo de acceso peatonal / Adding labels needed for pedestrian access mapping
Si bien el objetivo inicial era mapear ciclovías, la ruta seleccionada para el mapeo no cuenta con un circuito de ciclovía completo. Sin embargo, existen pequeñas secciones de ciclovías que solo se habilitan los fines de semana.
Considerando la importancia de este medio de transporte, generamos una propuesta de circuito de ciclovía. Nuestros compañeros que viven en esta zona nos ayudaron a elaborarla, tomando en cuenta dos vías que podrían considerarse para su implementación.

Propuesta de circuito para la Ciclovia Ruta Irpavi 2 Sur / Proposed circuit for Irpavi 2 Sur Cycle Route
Adentrándonos al Mapeo de Riesgos
Durante el desarrollo de este proyecto, en marzo de este año, se produjo el desborde de los ríos Irpavi y Arumthaya debido a la temporada de lluvias. Este suceso ocurrió muy cerca del área seleccionada para el mapeo.

Desborde de los Rios Irpavi y Arunthaya / Overflow of the Irpavi and Arunthaya Rivers
Por lo tanto, no podíamos ser indiferentes ante esta situación. Realizamos un mapeo de etiquetas de riesgo. Adele Birkenes y Rory Nealon nos proporcionaron las pautas necesarias para agregar información sobre la vulnerabilidad a las inundaciones en OpenStreetMap, indicándonos qué etiquetas podríamos usar para anotar que un tramo de la calle ha sido afectado

Georeferenciacion y toma de datos en el área afectada/ Georeferencing and data collection in the affected area
Con el apoyo del Dr. Yuri Sandoval, Rodolfo Vargas y los miembros del capítulo, se realizó la verificación del trabajo de campo para la recolección de datos en el área afectada. Se observó el hundimiento de calles, deslizamientos, arrastre de material y el aumento del caudal de los ríos, lo que afectó tanto a los caminos vecinales como a las viviendas construidas cerca de los afluentes.
Teniendo esto en cuenta, las viviendas cercanas que ya se encontraban mapeadas, junto con la georreferenciación del trabajo de campo que realizamos, nos permitieron añadir las etiquetas necesarias.

Mapeo de etiquetas de riesgo, calles e infraestructura afectada
Mapping of risk labels, affected streets and infrastructure
Conclusiones
Desafíos y Recomendaciones
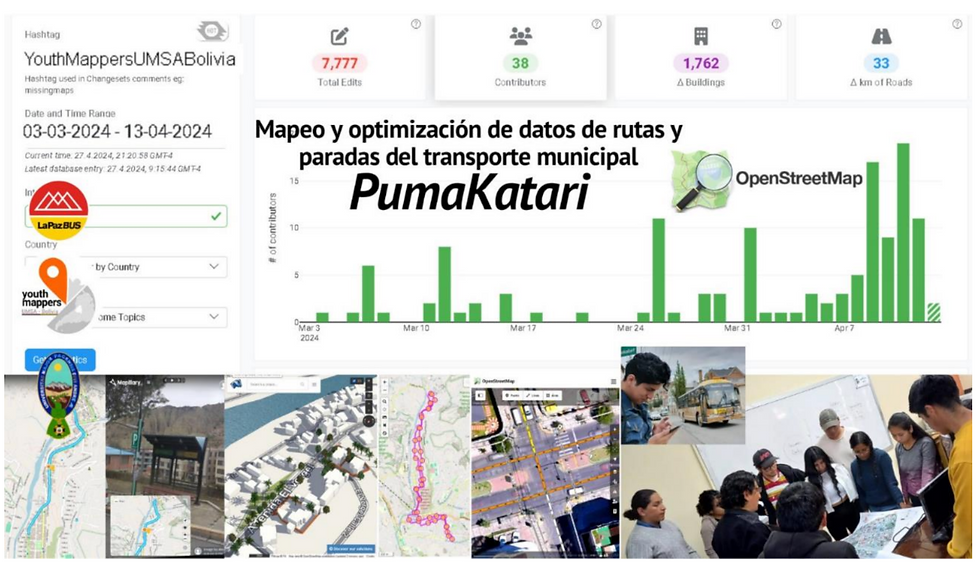
Actividades de Mapeo y Estadsiticas / Mapping Activities and Statistics
Finalizar el proyecto fue un gran desafío, pero estamos orgullosos de haberlo logrado y de todo lo que aprendimos en el proceso. Al principio, teníamos muchas expectativas y ganas de comernos el mundo. Sin embargo, a medida que avanzábamos en el análisis, nos dimos cuenta de que completar el mapeo de las 10 rutas llevaría más tiempo de lo previsto. Con el límite para la presentación de resultados de los microgrants en mente, entendimos que necesitaríamos más tiempo y recursos para completar el proyecto con la calidad deseada.
En las primeras fases del proyecto, nuestras expectativas también se ajustaron. Inicialmente, pensamos que podríamos realizar el vuelo de dron en una sola sesión de trabajo de campo, pero pronto nos dimos cuenta de que, debido a la cantidad de baterías disponibles y al procesamiento necesario para capturar todas las rutas, requeriríamos más tiempo para generar un mapeo detallado.
Aunque el servicio de transporte público en La Paz tiene rutas definidas, la ciudad enfrenta constantes cambios en estas rutas debido a bloqueos, marchas y congestión vehicular. La aplicación de la Alcaldía es útil porque envía notificaciones sobre rutas alternas, pero consideramos esencial mapear estas alternativas. Conocerlas es crucial tanto para la comunidad local como para los visitantes.
Profundizar en el mapeo de vías y aceras, especialmente para personas con discapacidad, y en el mapeo de riesgos, fue un valor añadido inesperado pero indispensable. Este enfoque nos brindó una mayor comprensión de su importancia y nos proporcionó valiosas pautas para futuros proyectos.
Nos ha dado una muestra clara y grandes pautas para seguir avanzando. La satisfacción de haber generado una base de datos detallada de las paradas identificadas y de haber desarrollado una metodología más clara para estructurar el proceso nos motiva a continuar con las siguientes rutas. Esto mejorará la calidad y completará la información en OpenStreetMap.
Formar parte de los proyectos seleccionados por los microgrants de Latinoamérica ha sido una experiencia maravillosa. Pudimos apreciar la diversidad de enfoques en el mapeo de acceso abierto y compartir nuestro trabajo en la presentación del Cafecito de YouthMappers. Conocimos otros proyectos increíbles de la región y reforzamos nuestro interés en seguir mapeando. Nos motiva continuar con más proyectos que contribuyan a mejorar nuestra localidad e inspiren a más jóvenes a aprender sobre estas herramientas y descubrir cómo pueden convertirse en agentes de cambio.
Agradecimientos
Un agradecimiento especial a:
Los embajadores regionales que nos dieron sugerencias en cada etapa. Gracias por brindarnos la oportunidad de poner en marcha este proyecto y acompañarnos en cada fase.
El haber tenido un acercamiento al trabajo que realiza Trufi Association en Cochabamba fue muy importante. A través del conocimiento de su metodología y del uso de datos abiertos, pudimos mejorar significativamente nuestros esfuerzos.
Nuestro colaborador: Rodolfo Vargas (miembro de OSM Bolivia) por la constante actualización de las herramientas de OSM, no solo en esta actividad, sino desde los inicios de nuestro capítulo. Su confianza y generosidad al prestarnos equipos para elaborar el mosaico del vuelo de dron fueron fundamentales para el proyecto.
El Dr. Yuri Sandoval y el Ing. Javier Núñez, cuya mentoría fue importante para el desarrollo de este proyecto. Gracias por apoyarnos y acompañarnos.
Estamos enormemente agradecidos con todos los miembros del capítulo YouthMappers UMSA Bolivia que nos colaboraron en culminar este proyecto. Nada de esto se habría logrado sin un trabajo en equipo.
Autores: Cristhian Mayta, Silvana Cachi, Soledad Bautista, Silvio Flores, miembros del capítulo de YouthMappers UMSA Bolivia y estudiantes de tercer y quinto año de la Carrera de Ingeniería Geográfica en la Universidad Mayor de San Andrés.
…………………………………………………………………………………………………………
Mapping and data optimization of routes and stops of the PumaKatari municipal transport, nearby pedestrian and cycling routes, in the city of La Paz, Bolivia
IRPAVI 2 SOUTH ROUTE
(YouthMappers UMSA Bolivia Chapter) MicroGrants Latam
Acknowledgment: This post was delayed in publication and may contain outdated information.We appreciate your understanding
The city of La Paz, Bolivia, has the Puma Katari public transportation service, which covers the 9 macro districts and is currently deployed through 10 routes.
Since its launch, this service has been a great promise, offering benefits such as preferential treatment for people with disabilities, children and the elderly, in addition to allowing the transport of bicycles in the front compartments of the buses, thus encouraging the use of this means of transportation.
We are often traveling to different places in the city to carry out our field work. We know that some visitors or even people who know about this transportation service face difficulties because they do not know which route to take or where the stops are, especially when trying to reach peripheral areas.
We have had the experience of looking for a PumaKatari stop and, when trying to find it, the navigator pointed us to a location that, upon arrival, we discovered was no longer in use. This made us wonder: how reliable is the information we are using? As connoisseurs of OpenStreetMap (OSM), we decided to investigate if the PumaKatari information was updated on this platform.
Upon further investigation we found that the information available in OSM of this area presents inaccuracies in some data and a lack of updated data on routes and vehicle stops of the PumaKatari municipal transport.
As of November 2023, it could be seen on the OpenStreetMap platform. Of the 10 PumaKatari routes, only 5 are mapped in OSM, that is, barely 50%. And of the 603 stops that exist, only 288 are registered (48%), and many of these are incomplete or imprecise.
It was also noted that very few pedestrian routes (sidewalks) and bicycle routes are mapped, in some sections, in a disconnected manner. It seems that the mappings have been done in isolation, without clear coordination. So it is a project worth undertaking to make the lives of all of us who move around La Paz easier.
Through an investigation in the pages of the mayor's office, we identified a reliable source that details the routes taken by this transportation system. We downloaded the information available on the mayor's Mobility Planning Unit page and compared it with the information available on OSM.
Area to be mapped
To address this problem, the Irpavi II South route was selected as a pilot area for mapping and updating in OpenStreetMap. The map shows the round trip route as well as the area covered by the mapping. During the process, PumaKatari stops were downloaded from OSM, but it was noted that some were not recognized due to lack of uniformity in editing.
The black dots represent these stops, while the orange dots indicate the stops downloaded from the City Hall platform. This highlights the need to update OSM to accurately reflect all stops on the Irpavi II South route, ensuring the integrity of public transport information.
Purpose
This project not only seeks to update and add information in OpenStreetMap, but also to correct the lack of standardization observed. We will map pedestrian and cycling routes close to those of PumaKatari to provide safe infrastructure and encourage cycling.
Additionally, the project will encourage community participation in the use of sustainable transportation and will train YouthMappers-UMSA youth in mapping and updating data.
In a meeting to present the project to the mayor's office, we were informed about an application that already included stops and routes, although some of us were not aware of its existence. We saw that outside of this application, the information is not updated and available in other browsers.
With the aim of contributing positively to the city that has welcomed us, we hope that our initiative will help improve the distribution of transportation information in the community.
To strengthen our project, we contacted Trufi Association, who have extensive experience in developing mobile applications for urban transportation and in route mapping in OpenStreetMap. During a visit to the department of Cochabamba, they welcomed us and they kindly shared their experiences with us. They also provided us with a course with the necessary tools, which helped us improve our implementation of this project.
Methodology
Photogrammetric Survey
The first phase of this project consisted of carrying out the photogrammetric survey of the Irpavi II South and PumaKatari route using a UAV aircraft, as well as carrying out the corresponding photogrammetric processing.
First, we used a drone to capture aerial images of the PumaKatari's Irpavi 2 South route and process them to ensure they were accurate. These images were uploaded to OpenAerialMap.
Data Collection: IRPAVI II Route
In the second stage, we collected data in the field using the StreetComplete application to identify the type of road surface, verify if it had sidewalks and lighting, and generate notes for filling out data at each of the stops. In addition, the presence or absence of sidewalks could also be recorded in the data collected with StreetComplete.
Using the Mapillary app, we captured the round trip, documenting both the left and right sides of the road.
Remote Mapping
With the aerial images already published in OpenAerialMap, two projects were created on the TeachOSM Tasking Manager platform, taking advantage of being able to directly link the aerial photographs that we uploaded to OpenAerialMap in Tasking Manager.
The first project focused exclusively on mapping roads and stops, while the second focused on mapping houses, buildings and infrastructure, in order to make the most of the images captured by the drone.
To begin the work, it was necessary to carry out training in which the purpose of the project was shared.
Finally, we trained the YouthMappers-UMSA community to accurately map routes and stops on OpenStreetMap, including nearby walking and cycling routes.
For mapping routes and stops, we add essential information such as the cost of the service, the operator, the type of payment and the schedules.
We also record the type of road surface, which varies along the route. As for the stops, we note if they have seats, trash cans, umbrellas and if they have lighting. Additionally, we document the number of lanes and the direction.
For a more detailed description of the labels used, you can consult the following link:
By mapping pedestrian paths and sidewalks, we were able to identify several important aspects, such as whether they had raised or lowered curbs, whether the pedestrian crossing was marked or not, and whether there were pedestrian paths. In remote places on the outskirts, we even notice the absence of sidewalks. This mapping is very important to guarantee accessibility, especially for wheelchair users, and to evaluate the accessibility of establishments.
Although the initial objective was to map bike lanes, the route selected for mapping does not have a complete bike lane circuit. However, there are small sections of cycle paths that are only enabled on weekends.
Considering the importance of this means of transportation, we generated a proposal for a cycle path circuit. Our colleagues who live in this area helped us prepare it, taking into account two ways that could be considered for its implementation.
Getting into Risk Mapping
During the development of this project, in March of this year, the Irpavi and Arumthaya rivers overflowed due to the rainy season. This event occurred very close to the area selected for mapping.
Therefore, we could not be indifferent to this situation. We carry out a mapping of risk labels. Adele Birkenes and Rory Nealon provided us with the necessary guidelines for adding flood vulnerability information to OpenStreetMap, telling us what tags we could use to note that a stretch of street has been damaged.
With the support of Dr. Yuri Sandoval, Rodolfo Vargas and the members of the chapter, verification of the field work for data collection in the affected area was carried out. The collapse of streets, landslides, dragging of material and the increase in the flow of rivers were observed, which affected local roads and homes built near the tributaries.
Taking this into account, the nearby homes that were already mapped, along with the georeferencing of the field work we carried out, allowed us to add the necessary labels.
Conclusions
Challenges and Recommendations
Completing the project was a big challenge, but we are proud of having accomplished it and of everything we learned in the process. At the beginning, we had high expectations and a desire to take on the world. However, as we progressed through the analysis, we realized that completing the mapping of all 10 routes would take longer than anticipated. With the limit for the presentation of microgrant results in mind, we understood that we would need more time and resources to complete the project with the desired quality.
In the early phases of the project, our expectations were also adjusted. Initially, we thought we could perform the drone flight in a single fieldwork session, but we soon realized that due to the number of batteries available and the processing required to capture all the routes, we would require more time to generate a detailed mapping.
Although the public transportation service in La Paz has defined routes, the city faces constant changes in these routes due to blockades, marches and traffic congestion. The Mayor's application is useful because it sends notifications about alternative routes, but we consider it essential to map these alternatives. Knowing them is crucial for both the local community and visitors.
Going deeper into the mapping of roads and sidewalks, especially for people with disabilities, and risk mapping, was an unexpected but indispensable added value. This approach gave us a greater understanding of its importance and provided us with valuable guidelines for future projects.
It has given us a clear sample and great guidelines to continue moving forward. The satisfaction of having generated a detailed database of the identified stops and of having developed a clearer methodology to structure the process motivates us to continue with the following routes. Being part of the projects selected by Latin American MicroGrants has been a wonderful experience. We were able to appreciate the diversity of approaches in open access mapping and share our work at the YouthMappers Cafecito presentation. We learned about other incredible projects in the region and reinforced our interest in continuing mapping. We are motivated to continue with more projects that contribute to improving our town and inspire more young people to learn about these tools and discover how they can become agents of change.
Acknowledgments
Special thanks to:
The Regional ambassadors who gave us suggestions at each stage. Thank you for giving us the opportunity to launch this project and accompanying us in each phase.
Having an insight into the work that Trufi Association does in Cochabamba was very important. Through knowledge of their methodology and the use of open data, we were able to significantly improve our efforts.
Our collaborator: Rodolfo Vargas (member of OSM Bolivia) for the constant updating of OSM tools, not only in this activity, but since the beginning of our chapter. Their trust and generosity in lending us equipment to create the drone flight mosaic were fundamental to the project.
Dr. Yuri Sandoval and Ing Javier Nuñez, their mentoring was important for the development of this project. Thank you for supporting us and joining us.
We are enormously grateful to all the members of the YouthMappers UMSA Bolivia chapter who collaborated with us in completing this project. None of this could have been achieved without teamwork.
Authors: Cristhian Mayta, Silvana Cachi, Soledad Bautista, Silvio Flores, members of the YouthMappers UMSA Bolivia chapter and third and fifth year students of the Geographic Engineering Degree at the Universidad Mayor de San Andrés.



ragdoll drop perfectly combines humor and destruction. Watching the ragdoll bounce around never gets old!